At Sensor Expo 2019, Devon Brock, Manager of Product Knowledge for the Sensor Group within TE Connectivity explains the DOG2 microelectromechanical systems (MEMS) -based inclinometer used to control a robotic arm. The two-axis tilt sensor provides ±90-degree measurements in the x and y axes.
In the robotic arm, the inclinometer with its built-in electronic provides stability to any type of application where tilt is important through two types of CAN outputs. With its SAE J1839 CAN2.0B interface, 0.01° resolution (limited by the CAN protocol) and 70.5 x 45 x 15-mm plastic package, the horizontally-mounted inclinometer has an operating temperature range of -40°C to 85°C. Over this operating temperature range, the unit has a typical accuracy of 0.5° and typical accuracy of 0.15° at 25°C.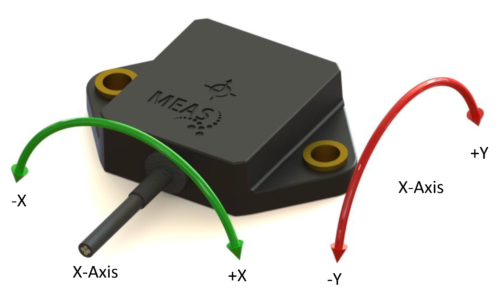
X-axis and y-axis outputs have linearized and temperature compensated angles in degree, where the reference is plane perpendicular to vector of gravity equal to the earth’s surface. With a typical weight of 60 grams, the sensor adds very little weight to a movable arm.
Two versions of the sensors are offered. The Source Address in the G-NSDOG2-200 is fixed at 0xC2 whereas in the G-NSDOG2-207, 0xC0 is the default but it is settable in the range of [0x80 – 0xF7].
The sensor comes with an AMP Superseal 1.5-Series, 4-position housing with a built-in locking feature that requires an AMP Superseal 1.5-Series (TE Connectivity part-no. 282088-1) at the connecting harness.
The dual axis tilt sensor was designed with a focus on platform leveling, dynamic engine management, tip-over protection and tilt alarm applications.