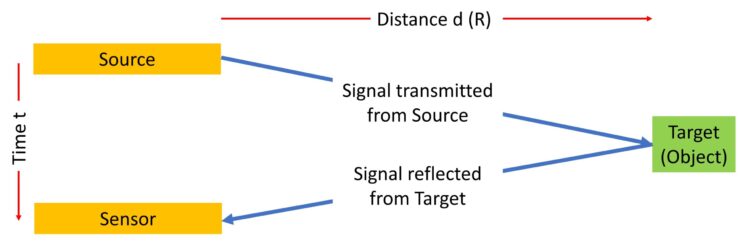
Using the time-of-flight (ToF) principle, a ToF sensor measures the distance between the sensor and an object. The sensor emits a signal that is reflected off an object and then detects the time for a round trip to occur. Typically, either light or sound waves can provide the transmitted signal. In either case, the distance or range is calculated by the equation:
R = v*ΔT/2
where R – range (in m),
v is the wave propagation velocity (in m/s) and
∆T is the round-trip time (in s).
Dividing by 2 reduces the round-trip time to the just the time it takes for the signal to reach the object.
In air, light traveling at 3*108 m/s provides greater range and faster readings than sound. However, in water sound provides a much better signal. Sonar or ultrasound (ultrasonic) devices penetrate water better than light so acoustic based ToF sensors are used to detect objects and measure distances underwater.
Similar to radar (radio detection and ranging) that uses radio waves in the electromagnetic spectrum, LiDAR (light detection and ranging) is a type of time-of-fight sensing technique. LiDAR uses pulsed lasers to build a point cloud to construct a 3D map or image. Infrared (IR) LEDs provide a lower cost ToF sensing than laser or radar-based techniques.
When light is the applied signal, there are two additional classifications: direct and indirect ToF sensors. Using short pulses of light, direct ToF sensors measure the time it takes for some of the emitted light to return to the receiver. In contrast, indirect ToF sensors send out continuous, modulated light and measure the phase of the reflected light to calculate the distance to an object.
In addition to well-known ToF sensing applications in smart phones as well as moving vehicles including parking and collision avoidance systems, ToF cameras are effective in people counting applications. Time-of-slight sensing technology can also provide a completely non-contact alternative to mechanical and capacitive level sensing in a silo, vat or tank.