by Rudy Ramos, Mouser Electronics
 Often overlooked is the value of a sense of touch in robotics development. Designers focus strongly on discrete features such as power, freedom of movement, and machine vision. However, tactile sensing complements all of these and helps make the most of them. Having a sense of touch also adds unique benefits of its own.
Often overlooked is the value of a sense of touch in robotics development. Designers focus strongly on discrete features such as power, freedom of movement, and machine vision. However, tactile sensing complements all of these and helps make the most of them. Having a sense of touch also adds unique benefits of its own.
While tactile sensors have great potential, they have been relatively underused in robotics. However, innovations in materials, sensors, and AI data processing techniques promise to change that.
An analogy that shows the importance of touch is our own experience of learning a complex task, such as driving, playing a musical instrument, writing or using chopsticks. Initially, these tasks are tiring. Our hands and body quickly become fatigued. Nevertheless, eventually the actions become almost effortless, and we can continue for hours.
One key reason these actions are initially tiring is that our muscles are applying too much force, inappropriately. (Think of a young child gripping a pen tightly as they struggle to form letters, or a tense first-time driver hunched uncomfortably over the steering wheel). However, as we learn to understand the task better and to interpret the feedback from our sense of touch, we learn to use our energy more economically. Similarly, a robot can use tactile sensors to save power, work more efficiently and precisely, and avoid damage to objects (or people).
Technology and applications
The current state of the art for practical robotic touch applications includes force-torque sensors built into the mechanism and low-resolution pressure sensors at the contact points of grippers acting as if they were the robot’s fingertips. Many current generation robots use these techniques. They highlight an obvious but essential principal for tactile robots; put the majority of the sensors near the system’s edges, as close as possible to the object being manipulated—just as they are in the human body.
Simple contact pressure sensors can use well-tried piezoresistive, piezoelectric or capacitive technologies. Capacitive sensors have the advantage of also functioning as proximity sensors, allowing the robot to slow down as it nears the target object, avoiding damage and wasted power. To provide a more human-like range of tactile senses, discrete sensors for temperature, moisture level and so on can be added to gripper pads—and of course, there is a vast range of components available to fill these roles.
Sensor fusion for safety and efficiency
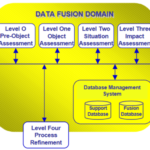
To build a versatile robot which can handle complex objects in a variety of orientations, we will need to integrate the inputs from a variety of sensors—sensor fusion. To take a simple example; a capacitive proximity sensor alone would become unreliable when handling a randomly oriented object with plastic and metal parts because the capacitance depends on the properties and orientation of those different materials, as well as their proximity.
Multiple sensors with overlapping areas of detection are perfect for safety-critical scenarios because contradictory data from two adjacent sensors immediately indicates a problem. (Another safety tip; sensors that send data continually help make sensor failure instantly detectible).
Accurate tactile feedback is particularly helpful for safety and efficiency in the fast-developing field of cobots: robots designed to work in close cooperation with humans. When human lives and expensive equipment are at risk, it is crucial to develop robotic systems with a failsafe philosophy.
Fortunately, modern AI and machine learning techniques are a good fit for tasks involving the integration of multiple different sensor inputs to make a decision. AI is a critical part of most recent advances in robot touch sensing, which give the robot a human-like skin with many sensors embedded in it.
Robot skin

The robotic skin concept, though challenging, promises a revolution in robotics. That is because an integrated, fine-grained tactile sensing array is a key to giving a genuinely human-like sense of touch, with all the versatility, safety and efficiency benefits that bring.
For example, unlike our traditional sensors, humans judge hardness by feeling the increase in the size of the contact area between the object and our hands as we apply pressure. A softer object will deform—increasing the size of that contact area—more than a harder object. Closely spaced sensors also greatly enhance the ability to sense texture. Skin-like robotic sensors can work in the same way.
Illustrating just how diverse solutions can be, MIT researchers successfully measured hardness by reflecting light from the shiny skin of a robot gripper, using a camera to measure the deformation of that skin.
The ideal robotic skin would integrate multiple sensors in one robust, flexible material—and numerous research projects are working towards this. Scientists in Taiwan have prototyped a robotic skin that uses an object’s interference with electrical fields to measure characteristics including proximity, hardness, temperature, and even moisture content. The robotic tactile skin itself can be the source and detector for the low-power electrical fields required.
A question with many answers
The field of advanced robotic tactile sensing is still wide open, with research pursuing multiple avenues. While the industry is still exploring tactile sensing, there is no doubt that it can enhance efficiency, safety, and precision of many robotic applications today.