Both variable reluctance (VR) and eddy current (EC) technologies provide contactless speed sensors based on interaction with a magnetic field.
A variable reluctance sensor can be thought of as an AC generator with an output voltage proportional to speed. With its self-generating electrical signal, a VR sensor does not require an external power supply. The sensor consists of a permanent magnet and a ferromagnetic pole piece surrounded by a coil of wire and generates an analog voltage output signal when a ferromagnetic material passes by the tip of the pole piece. Since the linear output is a frequency, an A/D converter is required to obtain a digital signal.
Variable reluctance sensors rely on the variation of the air gap and cannot measure the speed of a smooth body/surface. Where zero speed sensing is required, VR speed sensors have limitations since the signal reduces with lower speeds to a zero output a zero speed. However, amplified (active) VR sensors that integrate a preamplifier/signal conditioner within the sensor housing offer near-zero velocity (as low as 2 Hz) speed sensing and can tolerate larger air gaps.
Eddy current sensors are more commonly used for proximity or displacement measurements, but they can be used for speed sensing as well. There are both active and passive eddy current sensors.
In contrast to a VR speed sensor, the EC sensor just needs a conductive material for the target and not a magnetic material. Using the effect of eddy (circular) currents, the EC sensor senses the proximity of non-magnetic but conductive materials.
In an active, two-coil design, the active coil senses the presence of a nearby conductive object, and a balance coil nulls the output bridge circuit and is used for temperature compensation. The active coil is driven with a time varying excitation voltage in the 1 kHz to 1 MHz range.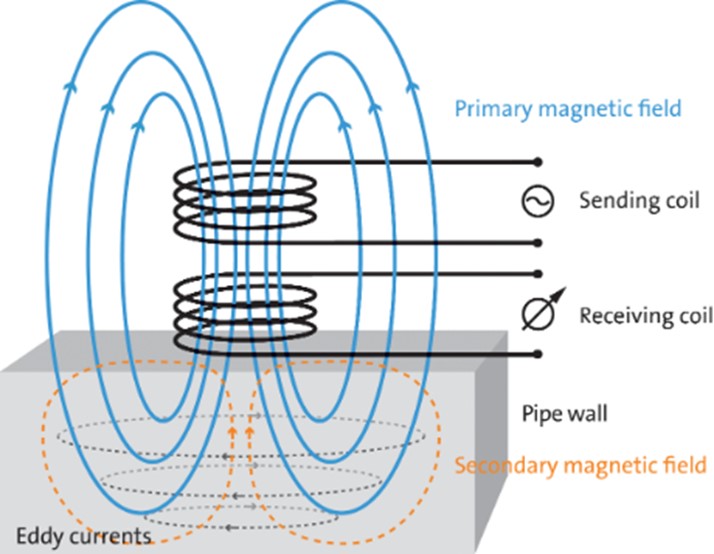
Image source ROSEN.
Similar to a VR sensor, passive eddy current sensors use permanent magnets, behave like small electrical generators, and do not require an external power source.
Eddy current sensors are often selected for applications with dirty environments because they have a high tolerance for dirt. They continue to work even if there is material between the probe and the target.