Multimodal robots that can fly and walk or crawl have been the basis of research for many years. In 2016, researchers at the University of Pennsylvania’s GRASP Laboratory reported the development of the Picobug with multimodal characteristics of climbing, jumping, and gliding, or even flying and swimming. With a research paper detailing many executed and next step items, sensing was among the avoided topics. The lack of subsequent information seems to indicate that it did not make it out of the development stage.

More recently, the FlyingFish in Part 2 also demonstrates this multimodal capability. There are other interesting research developments as well.
The Multi-Modal Mobility Morphobot or M4 can transform its body to achieve eight distinct types of motion depending on the requirements of the environment. and can autonomously assess the environment it faces to choose the most effective combination of motions to maneuver. The M4 can manipulate its four legs into:
- Four legs for quadrupedal locomotion
- Four thrusters for flight
- Two thrusters + two wheels for wing-assisted incline running (WAIR) over 45-deg slopes
- Two thrusters + two wheels for tumble over large obstacles
- Two wheels + two hands for loco-manipulation
- Two wheels for MIP
- Four wheels for an unmanned ground vehicle (UGV)
- Four wheels for crouching
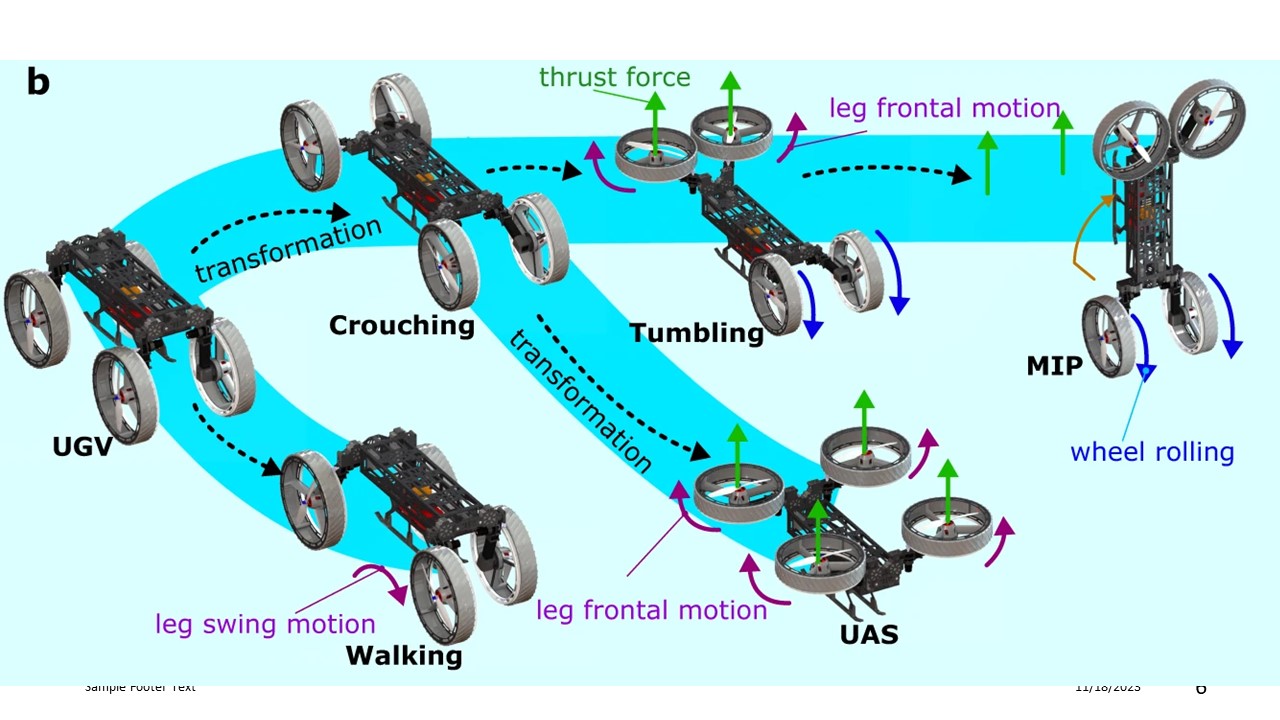
These morphing capabilities enable it to (1) fly, (2) roll, (3) crawl, (4) crouch, (5) balance, (6) tumble, (7) scout, and (8) loco-manipulate. To do this, the M4 accesses onboard computers and sensors (a motion-capture computer) to autonomously transition from one mode to another negotiate an unstructured environment. Researchers envision a broad number of applications for the M4, including search and rescue operations, space exploration, automated package handling in residential spaces, digital agriculture, and more.
Built for challenging environments, the High Mobility Robot (HMR) from Revolute Robotics boasts the ability to navigate ground and aerial routes using an exoskeleton. Inside its hamster-cage like construction, it holds the mechanisms that allow it to roll across the ground and transition to flight mode when needed to complete its mission. For inspection, security, or defense purposes the HMR has video streaming as one its essential sensing aspects. Together with an IMU for sensing stabilization and GPS-denied navigation, this sensing can be close to meeting all the requirements for reconnaissance and search and rescue while transitioning from rolling to flying as required. More specific tasks such as improvised explosive device (IED) detection bring more application-specific sensing into use depending on whether the HMR needs to detect a chemical, biological, radiological, or nuclear IED.

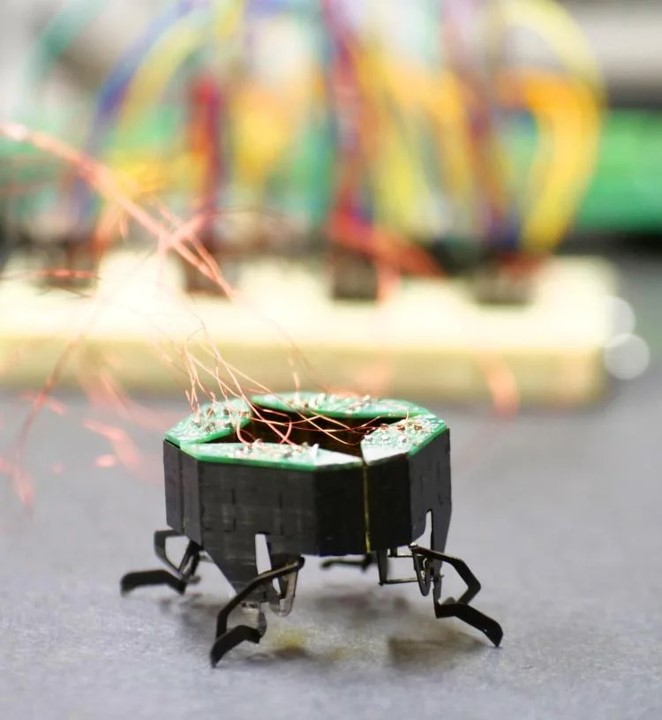
The modular design of another transformable, miniature robot, a Compliant Legged Articulated Robotic Insect, or CLARI, allows it to change its shape from square to long and slender as well as add more legs to its basic four-legged design. CLARI can transition from about 34 mm (1.3 inches) wide in its square shape to about 21 mm (0.8 inches) wide in its elongated form. While still in its development phase, researchers want to incorporate sensors into CLARI in the future so it can detect and react to obstacles.
References
Tiny Little Multi-Modal Picobug Walks, Flies, Grabs Stuff – IEEE Spectrum
IED Attack Fact Sheet | Homeland Security (dhs.gov)


